
|
Home | Libraries | People | FAQ | More |




The Boost.Asio library offers side-by-side support for synchronous and asynchronous operations. The asynchronous support is based on the Proactor design pattern [POSA2]. The advantages and disadvantages of this approach, when compared to a synchronous-only or Reactor approach, are outlined below.
Let us examine how the Proactor design pattern is implemented in Boost.Asio, without reference to platform-specific details.
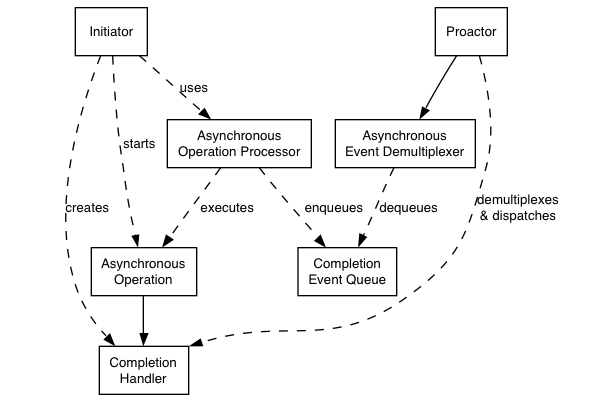
Proactor design pattern (adapted from [POSA2])
— Asynchronous Operation
Defines an operation that is executed asynchronously, such as an asynchronous read or write on a socket.
— Asynchronous Operation Processor
Executes asynchronous operations and queues events on a completion event queue when operations complete. From a high-level point of view, services like
stream_socket_serviceare asynchronous operation processors.
— Completion Event Queue
Buffers completion events until they are dequeued by an asynchronous event demultiplexer.
— Completion Handler
Processes the result of an asynchronous operation. These are function objects, often created using
boost::bind.
— Asynchronous Event Demultiplexer
Blocks waiting for events to occur on the completion event queue, and returns a completed event to its caller.
— Proactor
Calls the asynchronous event demultiplexer to dequeue events, and dispatches the completion handler (i.e. invokes the function object) associated with the event. This abstraction is represented by the
io_serviceclass.
— Initiator
Application-specific code that starts asynchronous operations. The initiator interacts with an asynchronous operation processor via a high-level interface such as
basic_stream_socket, which in turn delegates to a service likestream_socket_service.
On many platforms, Boost.Asio implements the Proactor design pattern in
terms of a Reactor, such as select,
epoll or kqueue. This implementation approach
corresponds to the Proactor design pattern as follows:
— Asynchronous Operation Processor
A reactor implemented using
select,epollorkqueue. When the reactor indicates that the resource is ready to perform the operation, the processor executes the asynchronous operation and enqueues the associated completion handler on the completion event queue.
— Completion Event Queue
A linked list of completion handlers (i.e. function objects).
— Asynchronous Event Demultiplexer
This is implemented by waiting on an event or condition variable until a completion handler is available in the completion event queue.
On Windows NT, 2000 and XP, Boost.Asio takes advantage of overlapped I/O to provide an efficient implementation of the Proactor design pattern. This implementation approach corresponds to the Proactor design pattern as follows:
— Asynchronous Operation Processor
This is implemented by the operating system. Operations are initiated by calling an overlapped function such as
AcceptEx.
— Completion Event Queue
This is implemented by the operating system, and is associated with an I/O completion port. There is one I/O completion port for each
io_serviceinstance.
— Asynchronous Event Demultiplexer
Called by Boost.Asio to dequeue events and their associated completion handlers.
— Portability.
Many operating systems offer a native asynchronous I/O API (such as overlapped I/O on Windows) as the preferred option for developing high performance network applications. The library may be implemented in terms of native asynchronous I/O. However, if native support is not available, the library may also be implemented using synchronous event demultiplexors that typify the Reactor pattern, such as POSIX
select().
— Decoupling threading from concurrency.
Long-duration operations are performed asynchronously by the implementation on behalf of the application. Consequently applications do not need to spawn many threads in order to increase concurrency.
— Performance and scalability.
Implementation strategies such as thread-per-connection (which a synchronous-only approach would require) can degrade system performance, due to increased context switching, synchronisation and data movement among CPUs. With asynchronous operations it is possible to avoid the cost of context switching by minimising the number of operating system threads — typically a limited resource — and only activating the logical threads of control that have events to process.
— Simplified application synchronisation.
Asynchronous operation completion handlers can be written as though they exist in a single-threaded environment, and so application logic can be developed with little or no concern for synchronisation issues.
— Function composition.
Function composition refers to the implementation of functions to provide a higher-level operation, such as sending a message in a particular format. Each function is implemented in terms of multiple calls to lower-level read or write operations.
For example, consider a protocol where each message consists of a fixed-length header followed by a variable length body, where the length of the body is specified in the header. A hypothetical read_message operation could be implemented using two lower-level reads, the first to receive the header and, once the length is known, the second to receive the body.
To compose functions in an asynchronous model, asynchronous operations can be chained together. That is, a completion handler for one operation can initiate the next. Starting the first call in the chain can be encapsulated so that the caller need not be aware that the higher-level operation is implemented as a chain of asynchronous operations.
The ability to compose new operations in this way simplifies the development of higher levels of abstraction above a networking library, such as functions to support a specific protocol.
— Program complexity.
It is more difficult to develop applications using asynchronous mechanisms due to the separation in time and space between operation initiation and completion. Applications may also be harder to debug due to the inverted flow of control.
— Memory usage.
Buffer space must be committed for the duration of a read or write operation, which may continue indefinitely, and a separate buffer is required for each concurrent operation. The Reactor pattern, on the other hand, does not require buffer space until a socket is ready for reading or writing.
[POSA2] D. Schmidt et al, Pattern Oriented Software Architecture, Volume 2. Wiley, 2000.